
KJ1743车辆管理系统矿山无轨运输设备防碰撞系统
KJ1743车辆管理系统矿山无轨运输设备防碰撞系统
系统概述
矿山无轨运输设备智能防碰撞系统的建设方案,旨在提高矿山作业的安全性,减少运输事 故,提升整体运营效率。智能防碰撞系统通过集成先进的传感器技术、定位技术、数据处理与通信技术,实时监测无轨运输设备的运行状态和周围环境,实现设备间的智能防碰撞功能。专为矿山多样化车型设计,全面覆盖装载机、无轨胶轮运人车、铲运机、矿用皮卡、矿用指挥车及自卸工程车等矿山主流车型的安全需求,为不同车型定制安全防控方案。 系统通过UWB定位技术、AI视频技术、红外技术,实时监测车辆周围人员信息,及时发现潜在的碰撞风险,并通过控制主机实时预警和发出控制信号,避免或减少人员碰撞事故的发生,保障井下作业人员的生命安全和设备的正常运行。 系统的UWB定位基站采用全向定位技术,同时具备检测人员距离和方位信息的功能,能够适应井下不同车型,适应狭窄、复杂的巷道条件,以及光线不足、粉尘多等恶劣环境,具有较高的可靠性和稳定性。
系统主要特点
系统采用先进UWB全向定位技术,实时检测靠近无轨运输设备的人员距离和方位信息,实现人 员接近作业车辆的三级报警和信息提示,当人员接近车辆到设置极限时自动报警提示,确保井下人 员的人身安全。此外,选配 AI 摄像头,可实时监测驾驶员工作状态,驾驶员有探头、伸手等违章动 作时自动报警提示,驾驶员离开座椅时即可停车制动,提高了无轨运输车辆的安全运行。
1. 高精度实时定位与追踪
厘米级定位:基于UWB全向基站,实现人员与设备的实时定位,支持井下复杂巷道内的人员接近定位。
动态目标识别:区分车辆、人员,实时更新位置、运动方向,预判潜在碰撞风险。
2.多纬度感知与融合
通过AI摄像仪与红外传感器的协同融合,消除车辆盲区,实现井下复杂环境下的全天候障碍物检测与人员防护。
3.驾驶员行为分析
驾驶安全行为检测系统通过AI视觉算法与传感器融合技术,构建多维安全防护体系。系统实时 监测驾驶座"无司机状态"并触发告警,通过行为分析技术进行疲劳检测、分心检测、打电话检 测、抽烟检测、无口罩检测、无安全带检测、遮挡摄像头检测等,通过车载终端实时语音提醒并对违规行为进行抓拍,有效降低因人为因素引发的井下安全事故风险,助力矿山建立驾驶员 行为规范数字化档案,形成"监测-预警-整改-教育"的全流程闭环管理机制。
4.智能分级预警
系统具有多级报警及控制信号输出功能,并能通过声光报警,提醒驾驶员以及周边人员。
边缘决策:车载主机毫秒级响应,本地独立执行决策不依赖外接网络,降低安全决策耦合。
三级预警机制:
绿色监测:人车距离>安全阈值,持续监控无干预;
黄色提醒:人车进入预警区,触发声光警示;
红色制动:人车逼近紧急制动区,触发声光警示,输出信号。
5.全流程数据协同管理
历史数据查询:实时上传数据至平台,可查看车辆轨迹、接近报警停车记录、AI驾驶行为报警等数据;
电子围栏:远程划定禁行区、限速区,人员或车辆违规进入时自动锁定操作权限;
事故溯源:记录事件全维度视频数据(定位、视频、车速),提供责任分析基础数据证据。
6.安全策略与权限管理
白名单:针对特定车辆、区域或人员设置豁免规则,在保障安全的前提下优化作业流程。
临时检修人员:保障检修人员作业安全,同时避免设备误报警导致的频繁停机。
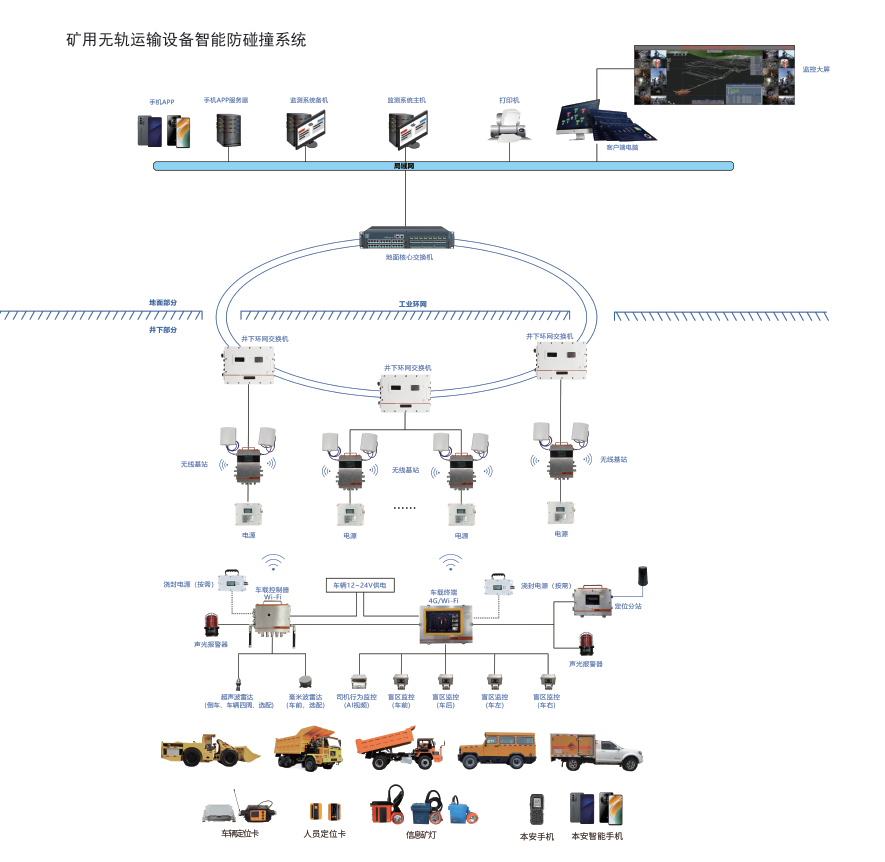
系统架构
系统由控制器、UWB定位基站、人员及车辆定位卡、AI摄像仪、车载终端等组成,结构示意图如下:
系统主要功能
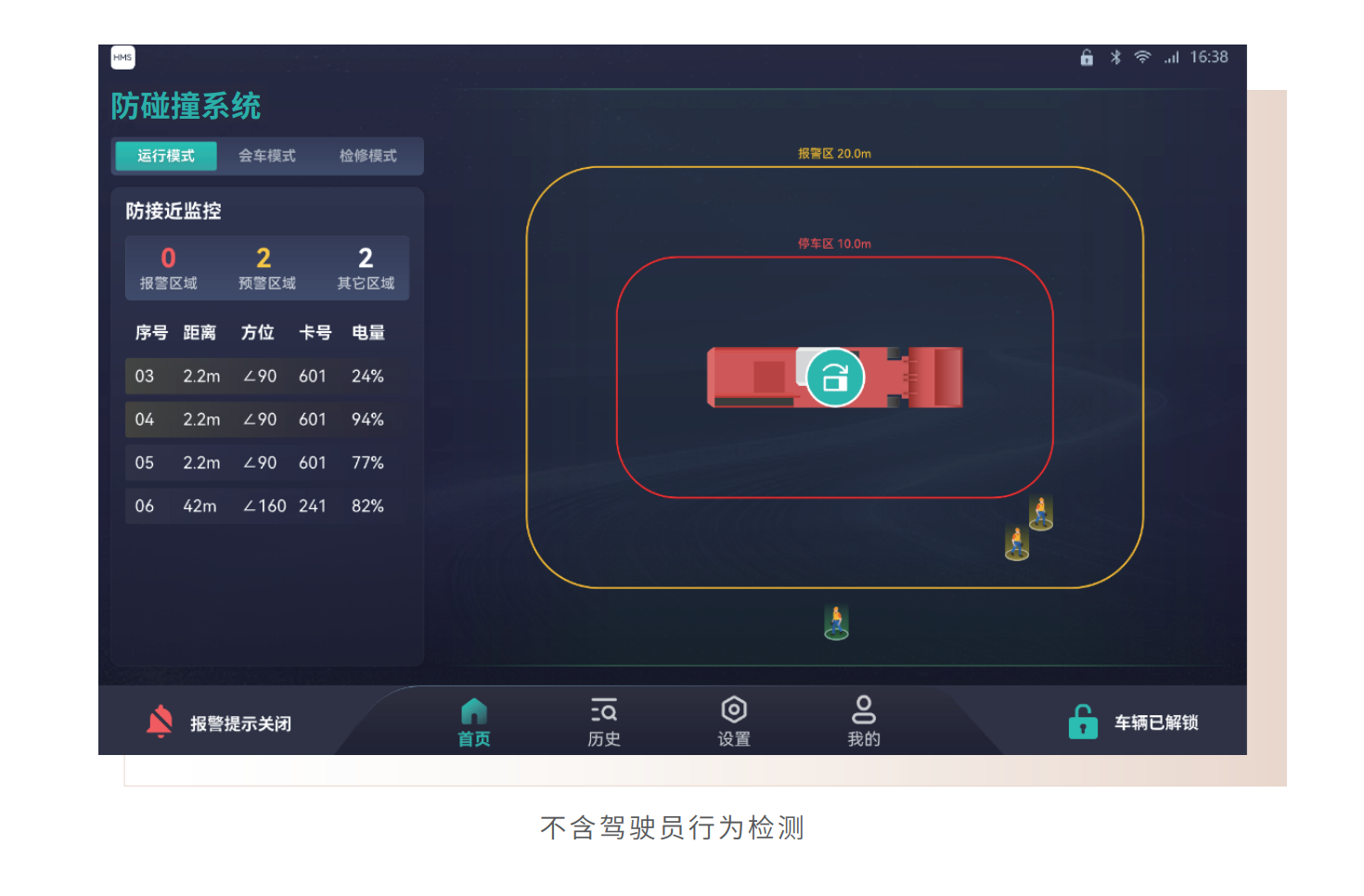
系统具有多级区域预警和报警功能,根据不同车型划分多级预警区域,实时监测人员位 置,当人员进入预警区或报警区域时,声光报警发出提醒,定位卡进行联动呼叫提醒, 当人员远离区域后,报警自动解除;
系统可通过手机进行参数配置、系统升级等功能,基站需支持Wi-Fi通信功能;
采用UWB技术的人员接近防护系统支持无线急停功能,通过定位卡/信息矿灯可实现紧 急情况下对设备无线停机;
采用UWB技术的人员接近防护系统支持检修人员授权设置功能;
司机脱岗报警功能:通过UWB定位分站可设置司机的工作区域,当司机在设备的工作 区域时,设备正常运行;当司机离开工作岗位时,立即触发设备停机;
双向报警功能,当人员闯入设备报警区域时,设备上的声光报警器或广播发出相应的报 警信号和语音,同时人员随身携带的定位卡发出声音加振动的报警信号,提醒人员主动 避害;
检修模式:当车辆进行停车检修时,在确保安全的前提下,可以启动检修模式,并设置 检修人员和检修时间免报警;
系统白名单设置:针对司机或者矿方指定的人员和特殊工种进行白名单设置,当白名单 人员进入各个区域时,系统不会触发报警和停机信号;
分级权限管理功能:不同人员所具备的权限不同。
软件界面





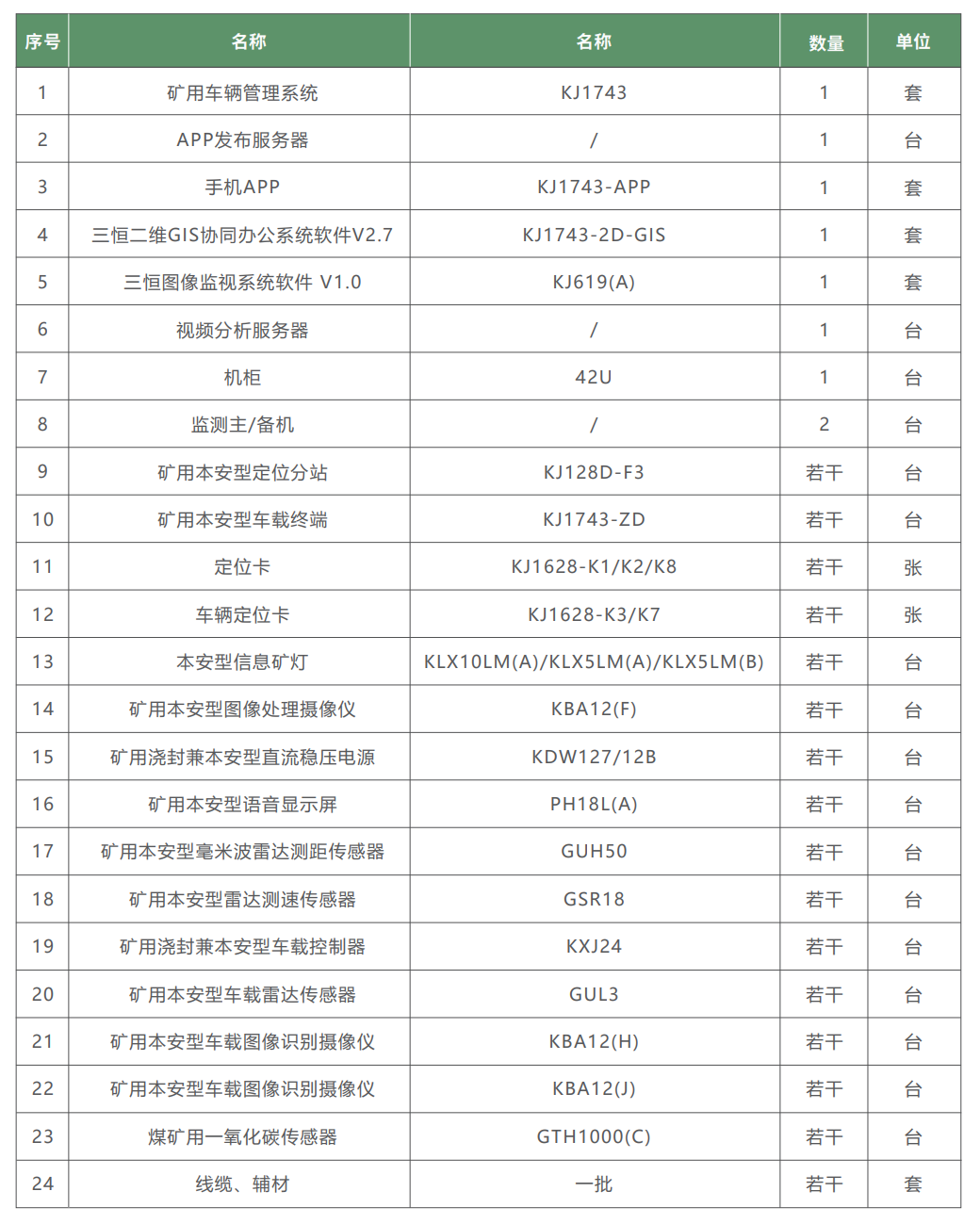
配置清单
售后支持:0519-85196757/81669588 人力资源: 0519-85765629
Copyright © 1996- 三恒科技 版权所有 网站备案号:苏ICP备18019669号